File:Triple torus illustration.png
{kind=link}
{kind=link}
{kind=link}
Size of this preview: 640 × 450 pixels.
| |
This is a file from the Wikimedia Commons. Information from its description page there is shown below.
Commons is a freely licensed media file repository. You can help. |
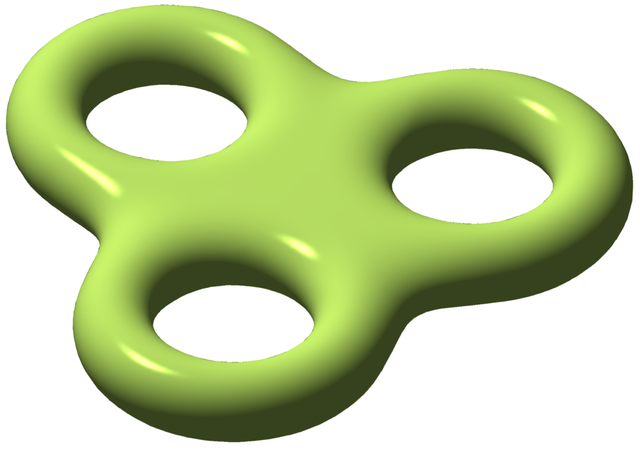
| Description | Illustration of a triple torus | ||
| Date | 18:01, 7 September 2007 (UTC) | ||
| Source | Own work, MATLAB source code below
|
||
| Author | Oleg Alexandrov |
 |
I, the copyright holder of this work, release this work into the public domain. This applies worldwide. In some countries this may not be legally possible; if so: I grant anyone the right to use this work for any purpose, without any conditions, unless such conditions are required by law.
|
 |
This math image could be recreated using vector graphics as an SVG file. This has several advantages; see Commons:Media for cleanup for more information. If an SVG form of this image is already available, please upload it. After uploading an SVG, replace this template with {{ vector version available|new image name.svg}}. |
Source code ( MATLAB)
function main() % illustration of a triple torus % torus radii r = 1; R = 3; Kb = R+r; Ks = R-r; % Km controls the smoothness of the transition from one ring to the others Km = 0.5125*Kb; L = 2.5*(r+R); h = 0.2; % grid size X = (-L):h:L; m = length(X); Y = (-L):h:L; n = length(Y); Z = (-1.1*r):h:(1.1*r); k = length(Z); W = zeros(m, n, k); for i=1:length(X) for j=1:length(Y) x = X(i); y = Y(j); [x, y] = triple_torus_function (x, y, r, R, Kb, Km); val = (sqrt(x^2+y^2)-R)^2-r^2; W(i, j, :) = val + Z.^2; end end figure(1); clf; hold on; axis equal; axis off; light_green=[184, 224, 98]/256; % light green H = patch(isosurface(X, Y, Z, W, 0)); isonormals(X, Y, Z, W, H); mycolor = light_green; set(H, 'FaceColor', mycolor, 'EdgeColor','none', 'FaceAlpha', 1); set(H, 'SpecularColorReflectance', 0.1, 'DiffuseStrength', 0.8); set(H, 'FaceLighting', 'phong', 'AmbientStrength', 0.3); set(H, 'SpecularExponent', 108); daspect([1 1 1]); axis tight; colormap(prism(28)) view(-12, 40); % add in a source of light camlight (-50, 54); lighting phong; print('-dpng', '-r400', ... sprintf('Triple_torus_illustration.png')); function [x, y] = triple_torus_function (x, y, r, R, Kb, Km) % a deformation in the plane, which, when comosed with a torus will give % a triple torus % centre of one of the torii O = [-Kb, -Kb/sqrt(3)]; angle = 2*pi/3; Mat = [ cos(angle) -sin(angle); sin(angle) cos(angle) ]; p =[x, y]'; phi = atan2(y, x); if phi >= pi/6 & phi <= 5*pi/6 p = Mat*p; % rotate 120 degree counterclockwise elseif phi >= -pi/2 & phi < pi/6 p = Mat*p; p = Mat*p; % rotate 240 degrees counterclockwise end x=p(1); y = p(2); % reflect against a line, to merge two cases in one if y > x/sqrt(3) p = [x, y]; v = [cos(2*pi/3), sin(2*pi/3)]; p = p - 2*v*dot(p, v)/dot(v, v); x = p(1); y = p(2); end if x > O(1) % project to the y axis, to a point B if y < O(2) A = [O(1), y]; B = [0, y]; else A = O; p = [x, y]; rho = norm(p-O); B = O+(Kb/rho)*(p-O); % t = -O(1)/(x-O(1)); % B = [0, O(2)+t*(y-O(2))]; end p = [x, y]; d=norm(p-A); q = norm(B-A); d = my_map(d, q, Km); p = (d/q)*B+(1-d/q)*A; x=p(1); y=p(2); end % shift towards the origin x = x-O(1); y = y-O(2); function y = my_map(x, Kb, Km) if x > Kb y = Km + 1; elseif x < Km y = x; else y = Km+sin((pi/2)*(x-Km)/(Kb-Km)); end
File usage
The following pages on Schools Wikipedia link to this image (list may be incomplete):
Learn more
Wikipedia for Schools brings Wikipedia into the classroom. SOS Childrens Villages believes that a decent childhood is essential to a happy, healthy. Our community work brings families new opportunities through education, healthcare and all manner of support. Learn more about child sponsorship.